I. Pregled sistema
1. Pozadina projekta
Posljednjih godina, ilegalni prijevoz teretnih vozila na autoputevima postao je ozbiljan problem koji ugrožava sigurnost cestovnog prometa u zemlji. Preopterećuje autoputeve i mostove, što znatno smanjuje vijek trajanja cesta i mostova; istovremeno, faktor sigurnosti vozila se znatno smanjuje, što stalno uzrokuje prometne nesreće; također je lako uzrokovati gužve u prometu i zagađenje okoliša.
Vlade na svim nivoima širom zemlje kontinuirano su povećavale svoje napore u kontroli preopterećenog transporta drumskih vozila i postigle su važne fazne rezultate. Međutim, zbog složenih društvenih i ekonomskih faktora, nacionalna situacija s otkrivanjem preopterećenja je i dalje vrlo ozbiljna, a skrivene opasnosti od ponovnog pokretanja nisu eliminirane; konsolidacija rezultata upravljanja i kontinuirano promoviranje rada na otkrivanju preopterećenja i dalje je pod velikim pritiskom. Stoga je upravljanje preopterećenim transportom vozila dugoročan i svakodnevni posao, u kojem se mora istrajati. Ključno je uključiti upravljanje preopterećenim radom u dugoročni mehanizam. Ono također igra pravnu odvraćajuću ulogu u vezi s preopterećenim vozilima, a može proširiti svoje funkcije i na inspekciju cesta, suzbiti slučajni mentalitet ilegalnog transporta te pravovremeno kontrolirati i eliminirati različite ilegalne transportne operacije, uključujući preopterećeni transport.
2. Uvod u sistem vaganja
Princip vaganja statičke kamionske vage je parkiranje svih vozila na platformu za vaganje kako bi se izvagalo cijelo vozilo. Ima visoku tačnost vaganja i jasne nacionalne standarde. Međutim, konvencionalna kamionska vaga može izmjeriti samo težinu cijelog vozila, ali ne i osovinsko opterećenje. Može procijeniti da li je cijelo vozilo preopterećeno, ali ne može procijeniti da li je osovinsko opterećenje preopterećeno. Ne može ispuniti zahtjeve odjela za upravljanje putevima u pogledu upravljanja preopterećenim transportom.
Ovaj plan kombinuje dugogodišnje iskustvo naše kompanije u projektovanju i proizvodnji opreme za detekciju preopterećenja i njenu stvarnu primjenu u različitim regijama zemlje, pažljivo proučava upotrebu različite opreme za detekciju preopterećenja na tržištu i sveobuhvatno razmatra specifične potrebe odjeljenja za upravljanje autoputevima za upravljanje preopterećenim transportom. Usvaja naprednu tehnologiju i jedinstvene dizajnerske ideje za razvoj dinamičnog visokopreciznog sistema za detekciju težine vozila i tipa osovine. Može mjeriti i težinu osovine i ukupnu težinu, te može razlikovati tip osovine. Tačnost težine osovine se također može značajno poboljšati.
2. Sastav sistema preopterećenja i prekoračenja
1. Karakteristike sistema
Može vagati vozila koja prolaze malom brzinom i automatski utvrditi da li je težina vozila ili osovinska težina preopterećena;
Može detektovati broj osovina, grupu osovina, težinu osovine i težinu vozila;
Može formirati kompletne informacije o težini vozila, uključujući tip osovine, težinu osovine, grupu osovina i ukupnu težinu;
Može prenositi informacije o vaganju na računar putem podatkovnog interfejsa;
Osnovni dio sistema koristi zrelu i pouzdanu opremu, modularnog dizajna, jednostavnu za održavanje i proširivanje, što osigurava visoku pouzdanost sistema.
Sistemski softver je zreo, visoko pouzdan, podaci su potpuni i efikasni, te se mogu u potpunosti dijeliti, što efektivno poboljšava efikasnost rada i u najvećoj mjeri eliminira razne upravljačke propuste.
2. Sistemski proces
Kamion se uvodi u traku za vaganje pretovarne stanice, a sistem za prepoznavanje registarskih tablica identifikuje broj registarske tablice;
Identifikator gume (osovine) razlikuje broj osovina, a sistem za vaganje vozila počinje s vaganjem, određivanjem grupe osovina i izračunavanjem težine osovine.
Kada sva vozila prođu kroz separator vozila i uđu na platformu za vaganje, a vaga je u relativno uravnoteženom stanju, bilježi se ukupna težina vozila i dobija se osovinsko opterećenje.
Sistem za vaganje šalje informacije o vaganju (broj registarske tablice, broj osovina, težinu osovine, ukupnu težinu vozila itd.) računaru za detekciju. Računar utvrđuje da li je prekoračenje dozvoljene težine i prikazuje informacije o detekciji kao što su težina vozila, prekoračenje i stopa prekoračenja na ekranu.
Nakon što vozilo završi odgovarajuće operacije, osoblje za praćenje vozila pušta vozila koja nisu prekoračena da napuste područje detekcije u skladu s informacijama na ekranu, navodi vozila s prekoračenjem da uđu u područje stanice radi obrade, štampa obrazac za pregled vozila s prekoračenjem i vrši odgovarajuće operacije punjenja;
3. Sastav sistema i plan rasporeda
3.1 Sastav sistema
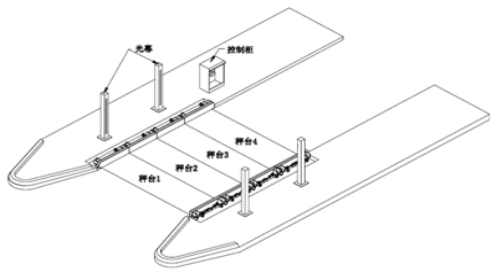
Sistem za detekciju prekoračenja i preopterećenja sastoji se od ZDG dinamičke vage za vaganje osovina sa četiri tabele, kontrolnog instrumenta, infracrvenog separatora vozila, identifikatora osovine točkova na platformi za vaganje, kontrolnog ormara (opcionalna oprema: sistem za prepoznavanje registarskih tablica, sistem sa velikim LED ekranom, sistem glasovnih uputstava, sistem za navođenje vozila, industrijski računar, štampač karata, UPS neprekidno napajanje, softver za sistem za detekciju prekoračenja i preopterećenja, sistem za nadzor) i ostale dodatne opreme i kablova.
3.2 Dijagram rasporeda sistema kao što je prikazano:
Tok rada:
1) Vozila ulaze u traku redom održavajući sigurnu udaljenost, aktivirajući infracrveni separator vozila;
2) Svaka osovina vozila prolazi kroz višepovršinsku platformu za vaganje;
3) Kontroler displeja obrađuje signal vaganja dobijen od senzora platforme za vaganje i signal senzora točka, odvaja osovinu prema logičkim uslovima i efikasno obrađuje posebne situacije;
4) Zadnji dio vozila napušta platformu za vaganje na više površina i infracrveni separator vozila;
5) Kontroler displeja sveobuhvatno procjenjuje signal kraja vozila na osnovu signala okluzije koji detektuje infracrveni separator vozila i signala vaganja koji dobija senzor za vaganje;
6) Kontroler displeja obrađuje signal vaganja dobijen kada gore pomenuto vozilo prođe kroz platformu za vaganje;
7) Kontroler displeja formira kompletne informacije o težini cijelog vozila, a kompletne informacije o težini uključuju brzinu vozila, tip osovine, težinu osovine, težinu grupe osovina, ukupnu težinu itd.;
8) Završite proces vaganja jednog vozila i sačekajte vaganje sljedećeg vozila
9) Tokom cijelog radnog procesa, sistem automatski obrađuje različite posebne situacije, kao što su potpuni ulazak i potpuni izlazak, ponovljeni ulazak i izlazak i dugotrajno zadržavanje na platformi za vaganje;
Sistem može automatski i efikasno riješiti situaciju sa vozilom koje prati vozilo, a vaganje vozila koje prati vozilo nema utjecaja na tačnost podataka.

Vrijeme objave: 20. februar 2025.